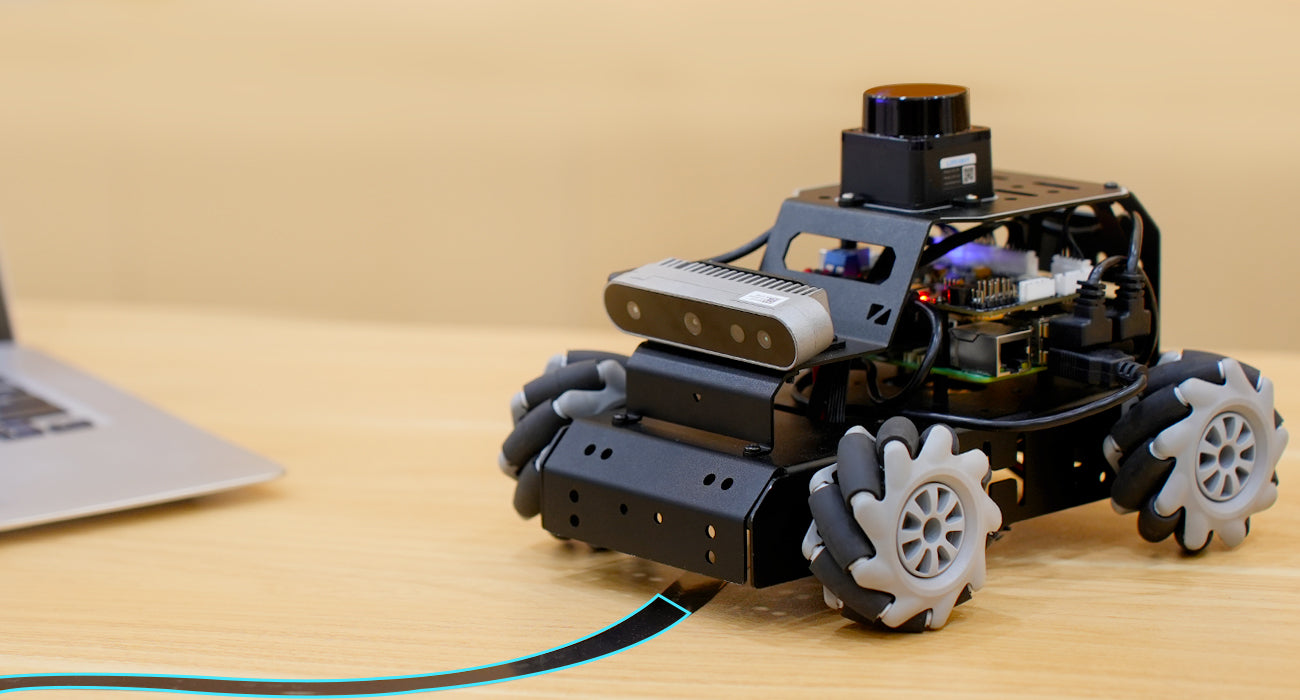
Mobile Robot Platform
MentorPi M1 Autonomous Mobile Robot
Autonomous Self Driving Robot
A ROS2-enabled mobile robot designed for teaching
SLAM, autonomous navigation, obstacle avoidance and
multi-sensor fusion. Ideal for courses in robotics,
AI and cyber-physical systems.
Sample Experiments
- Waypoint navigation and obstacle avoidance with LiDAR.
- Path planning and trajectory tracking for differential / mecanum drive.
- Vision-based object following and line/marker tracking.
AI Vision & Manipulator Trainer
Artificial Intelligence Kit with MechArm
AI Vision Enabled Pick Place Operation
Vision and AI education kit coupled with a compact 6-axis MechArm
(Payload: 250 g) to teach
image processing, YOLO detection, hand–eye calibration
and vision-guided pick-and-place on real hardware.
Core Experiments
- Color / shape recognition and basic OpenCV pipelines.
- YOLOv5-based object detection and sorting.
- Hand–eye calibration and image-to-robot frame mapping.
- Vision-guided pick-and-place with MechArm.
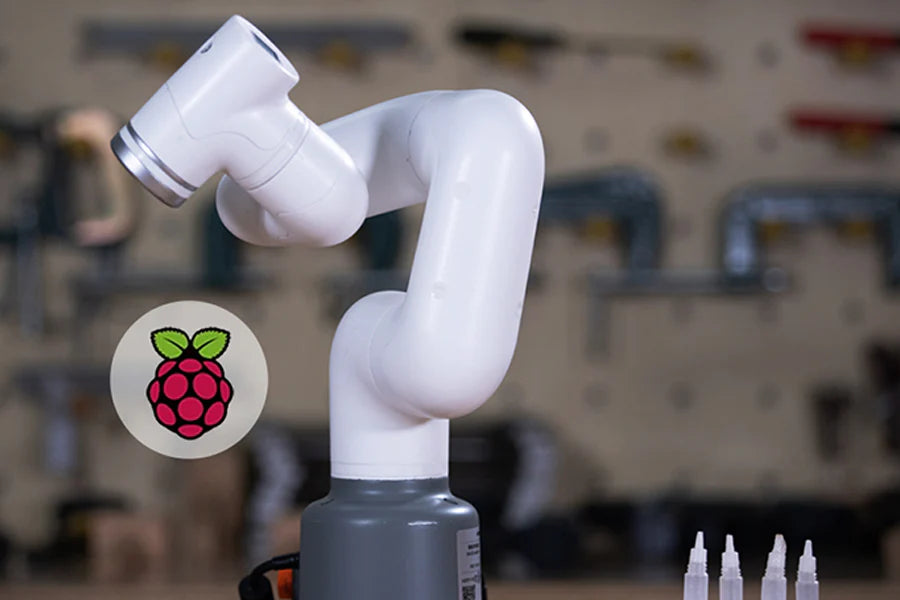
Industrial Manipulator Trainer
Vision & Tactile Robotic Manipulator Trainer
1Kg Payload Robot Arm
A compact manipulator platform that combines
gripper design, touch sensing, kinematics and
vision-guided pick & place experiments on a single setup.
Core Experiments
- Robot gripper actuation and force feedback basics.
- Manipulator kinematics analysis and workspace study.
- Object detection and image processing using vision sensors.
- Trajectory planning and analysis for point-to-point motion.
- Pick-and-place using the robot arm.
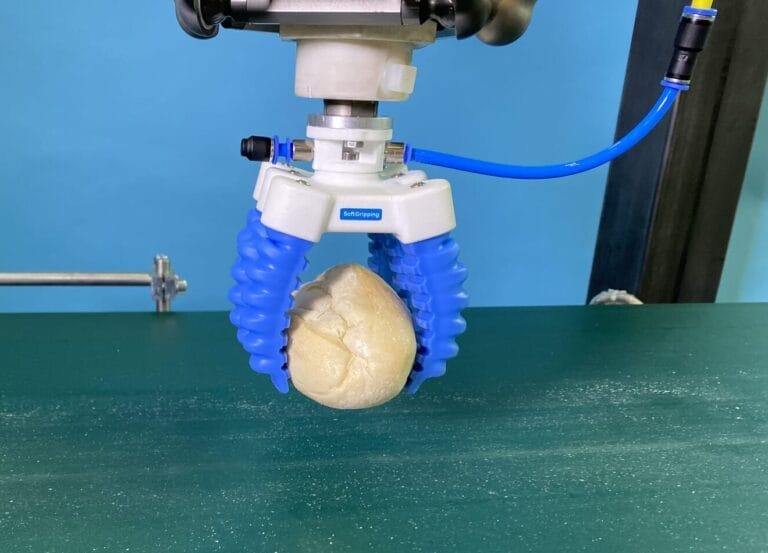
Soft Robotics Platform
Soft Robotic Gripper Kit
Adaptive Grasping for Irregular Shaped and Fragile Objects
A bio-inspired soft gripper system with pneumatic actuation, pressure sensing
and modular end-effectors for exploring
compliant manipulation and
safe human–robot collaboration.
Key Experiments
- Pneumatic soft finger actuation and pressure–deflection characterisation.
- Touch sensors interfacing and feedback system.
- Handling fragile objects (glass, fruits, light components) safely.
- Adaptive gripping of irregular shapes using multi-finger configurations.