Soft Robotics & Safe Human–Robot Interaction
Soft Robotic Gripper Kit
A bio-inspired, curriculum-ready platform for studying pneumatic soft actuation, compliant grasping, grip force control and safe handling of fragile or irregular objects.
Application Focus
Food handling, packaging, medical devices and collaborative robots.
Learner Levels
Ideal for B.Tech projects, M.Tech dissertations and research labs.
Technology Stack
Pneumatics, pressure sensing, embedded control and IoT logging.
Lab Integration
Complements manipulator and mobile robot trainers for a full lab.
Outcome: Students learn how to design and control compliant end-effectors that can safely interact with the real world.
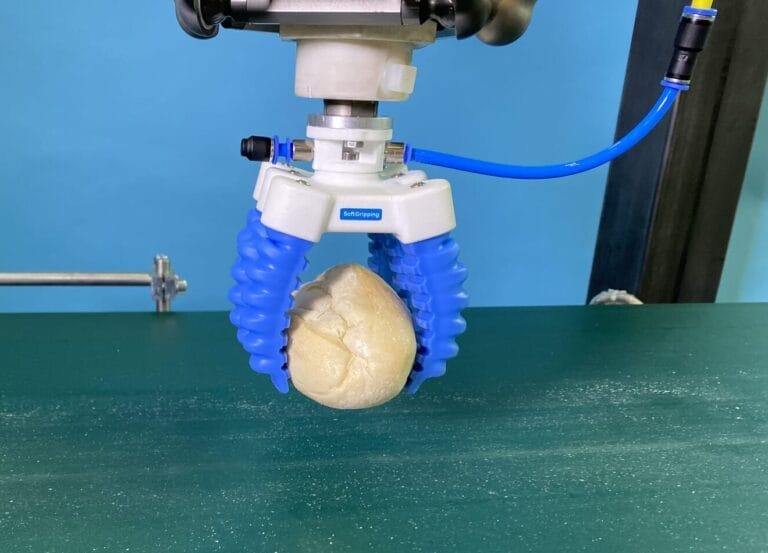
Soft Robotic Gripper Kit – pneumatic fingers, pressure sensing and modular end-effectors
for safe, adaptive grasping of fragile and irregular-shaped objects.
Core Experiments – As Per Requirement
Baseline experiments that align with lab objectives for soft robotics and compliant gripping.
- Pneumatic soft finger actuation and characterisation.
- Grip force vs pressure study for different objects.
- Handling fragile objects (e.g., fruits, glass, light components) safely.
- Adaptive grasp of irregular shapes using soft fingers.
- Closed-loop gripping with basic sensor feedback.
More Experiments – With Minor Add-Ons
Extended experiments suitable for advanced projects, internships and sponsored R&D.
- Integrating the soft gripper with a 6-DoF manipulator for hybrid soft–rigid manipulation.
- Vision-guided soft gripping for random objects on a conveyor or bin.
- Learning-based grip strategy: mapping object type to optimal pressure profile.
- IoT-enabled monitoring of grip cycles, pressure profiles and failure events.
- Comparative study of rigid vs soft grippers for specific industrial tasks.
- Design and testing of multi-finger soft hands with different finger geometries.
- Human–robot collaboration scenarios with inherently safe soft end-effectors.